Mechanical Parking Shuttle Robots: A Comparison of Two Telescopic Gear Systems
This article compares two types of telescopic gear shuttle robots used in mechanical parking systems, analyzing their structural differences, performance characteristics, and application scenarios in modern automated parking facilities.
Preface
As urban land resources become increasingly scarce, intelligent mechanical stereoscopic garages have become the core solution for expanding parking space in commercial districts, residential communities, and public transportation hubs. As the core execution unit of the stereoscopic garage, the vehicle transfer equipment's operational stability, access efficiency, adaptability, and safety directly determine the overall operation capability and user experience of the garage.
The mechanical stereoscopic garage telescopic comb transporter introduced in this article is a specialized vehicle transfer equipment developed for various intelligent stereoscopic garages and planar moving parking systems. It abandons the traditional car plate transfer mode and adopts a platenless telescopic comb interlocking technology, efficiently performing core actions such as vehicle translation, lift docking, and precise parking space access. The following text, combined with the full-land-use scenario of the equipment, will deeply analyze its refined electrical design details and comprehensively explain the product's practical value and technical advantages.
Compared with traditional transfer methods, the core advantages of this telescopic comb transporter are concentrated in three dimensions: high adaptability, high stability, and high safety. The product adopts a lightweight and compact structural design, adaptable to civil vehicles with different wheelbases and chassis heights, breaking through the vehicle type limitations of traditional equipment. Relying on a mature electrical control system, it achieves low-speed smooth start/stop and high-speed stable transfer, significantly improving the parking garage's access efficiency. It is equipped with a full set of electrical safety protection mechanisms, adaptable to the complex working conditions of garages with humidity, dust, and long-term continuous operation. At the same time, the modular electrical layout design greatly reduces the probability of equipment failure and the difficulty of later maintenance.
The telescopic comb transporters currently in use can be divided into two types according to their drive methods: one is driven by ordinary motors, and the other is driven by servo motors. There is no difference in their action principles, but there is a world of difference in transmission design and electrical control design.

Servo telescopic comb

Three-phase motor telescopic comb
As can be seen from the above figure, whether from the equipment structure or the electrical layout, they are completely different. The following will analyze the differences between the two in detail from an electrical perspective, focusing on the electrical design points of the servo-controlled transporter.
Deep Analysis of Electrical Design Details
I. Detection Principle
The detection principle of the two transporters is basically the same. Due to differences in mechanical structure design, the detection methods are quite different.
1. Positioning Sensor Design Method

The positioning sensors of the two transporters, one uses a magnetic switch and the other uses a retro-reflective switch.
Both positioning methods rely on the sensor finding the positioning block for positioning.
2. Telescopic Comb Retract Sensor Detection

Three-phase motor version front and rear telescopic comb retract switches

Servo motor version front and rear telescopic comb retract-in-position sensors
The method of detecting telescopic comb retraction is the same, both rely on detecting the position of the comb frame itself to trigger the switch.
3. Telescopic Comb Extend Sensor Detection

Servo motor version front and rear telescopic comb extend switches

Three-phase motor version front and rear telescopic comb extend-in-position
The detection method for the extend-in-position of both devices is the same; the principle is that after the telescopic flap touches the wheel, the sensor trigger signal is sensed.
4. Lift Up/Down Position Detection

The lift position detection method for both devices is basically the same; the switch is fixed, and the completion of the lift is determined by detecting whether the lift has reached the required position.
II. Electrical Control System
1. Electrical Control Hardware System Design
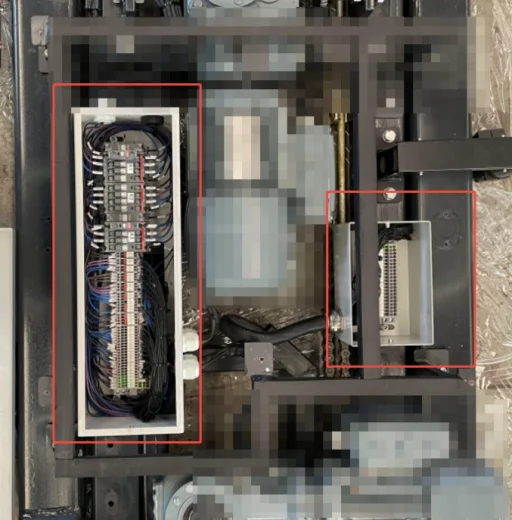
The servo device adopts a distributed modular electrical architecture. The overall control system consists of five major units: main PLC controller, servo drive module, sensing detection module, telescopic execution module, and communication interaction module. Each module operates independently and works in coordination. The modular design has significant advantages: on one hand, the circuit wiring is orderly, the line partitions are clear, and the strong and weak currents are separated, effectively avoiding line cross-interference and reducing the probability of short circuits and leakage faults; at the same time, the standardized electrical interface design perfectly adapts to the mainstream stereoscopic garage control systems on the market, with strong compatibility.

The dust-proof transparent cover design allows observation of the internal situation without removing the cover, maximizing the convenience of maintenance. The control box is isolated from the equipment fixing point by a buffer pad, and most of the vibration during equipment operation can be absorbed by the isolation pad. In addition, all wiring terminals use spring clamping to eliminate wiring looseness caused by equipment vibration.
The transporter has a complete control system, so the servo transporter can exist as a standard product, requiring only three-phase power supply, and the rest can be controlled through wireless communication.
The electric box in the three-phase motor version transporter is only equipped with contactors and wiring terminals. Due to space limitations, the control system cannot be integrated inside the transporter, and the signals and control outputs of the equipment must be sent to the periphery for control. Therefore, this transporter needs to be connected with two sets of cables: one set is the strong current system for controlling motor output, and the other set is the cable for collecting all control signals of the transporter. The two sets of cables have many cores, and two sets of external spring reels are required for cable retraction control. In terms of overall cost control and equipment stability, it is not as good as the servo version.
2. Electrical Control System Design
The equipment is equipped with a high-precision intelligent logic control circuit, relying on the PLC core control system and the servo drive closed-loop control algorithm to achieve precise control of the entire process of walking, telescoping, alignment, and handover. The control system has built-in self-adaptation logic. According to the vehicle weight, wheelbase, and parking position deviation, it automatically fine-tunes the telescopic comb stroke and walking trajectory to achieve zero-deviation precise vehicle handover. At the same time, the circuit integrates fault self-diagnosis and intelligent feedback functions. During operation, it monitors line status, sensor data, and motor working conditions in real time. Once an abnormality occurs, it immediately triggers an audible and visual alarm and records the fault code, simultaneously uploading it to the garage central control system, facilitating maintenance personnel to quickly troubleshoot. In addition, it supports functions such as automatic start/stop, linked lift, and intelligent scheduling, adaptable to multi-device collaborative operation, significantly improving the overall access efficiency of the garage.
Compared with the servo control system, the traditional three-phase motor control relies on a frequency converter. The frequency converter control is far inferior to the servo control system in achieving precise positioning, and the response speed of the motor also has a significant gap. These two main differences lead to a clear difference in access speed; the servo system is 30% faster than the three-phase motor system.
However, the traditional three-phase motor is not without advantages. Because it uses an ordinary motor, it has low environmental requirements and performs stably in high-temperature, high-humidity, and vibration environments. Moreover, it does not rely on communication for control, directly eliminating the possibility of equipment operation delay or loss of control caused by communication speed or communication failure. The transporter is generally used in conjunction with a traverse car, using one PLC to control both the traverse car and the transporter, which is more timely, stable, and controllable in terms of internal data interaction.
Summary
The above is the analysis and comparison of the two different structures of the telescopic comb transporter. As the core component of the stereoscopic garage, the two transporters have their own advantages and disadvantages, and need to be matched according to different projects. In the future, as the intelligent parking industry continues to upgrade, the product will continue to optimize electrical intelligent control and energy-saving technologies, adapting to more intelligent and intensive parking scenarios, providing core equipment support for improving the quality and efficiency of urban static transportation and expanding space.
About the Author

Shay Chen
Marketing Manager at CoPARK. Dedicated to promoting automated parking solutions and building partnerships across global markets.